.jpg)
.png)

Præ-processering med traditionel vision
Først præ-processering af billedet med traditionel 2D/3D vision.
For at optimere processen og undgå, at det neurale netværk skal processere et helt billede, hvilket er ressourcetungt og tager lang tid, så bruges traditionel vision-teknologi til at identificere mulige fejl på et givent emne - altså udpege områder, som skal undersøges nærmere.
Processering med ML
De udvalgte områder serveres så til et neuralt netværk, som er trænet på en stor mængde gode og dårlige samples, og som processerer billedet og giver det en score, der definerer, om det er inden for den fastlagte kvalitetsnorm.
.jpg?width=700&height=350&name=Hybrid%20Vision%20-%20Post-processeing%20(1).jpg)
Post-processering med traditionel vision
Hvis scoren er lige på grænsen, kan man vælge at lave post-processering med traditionel vision-teknologi, hvor man kigger efter specifikke, foruddefinerede fejltyper eller for eksempel målet størrelsen på fejl.
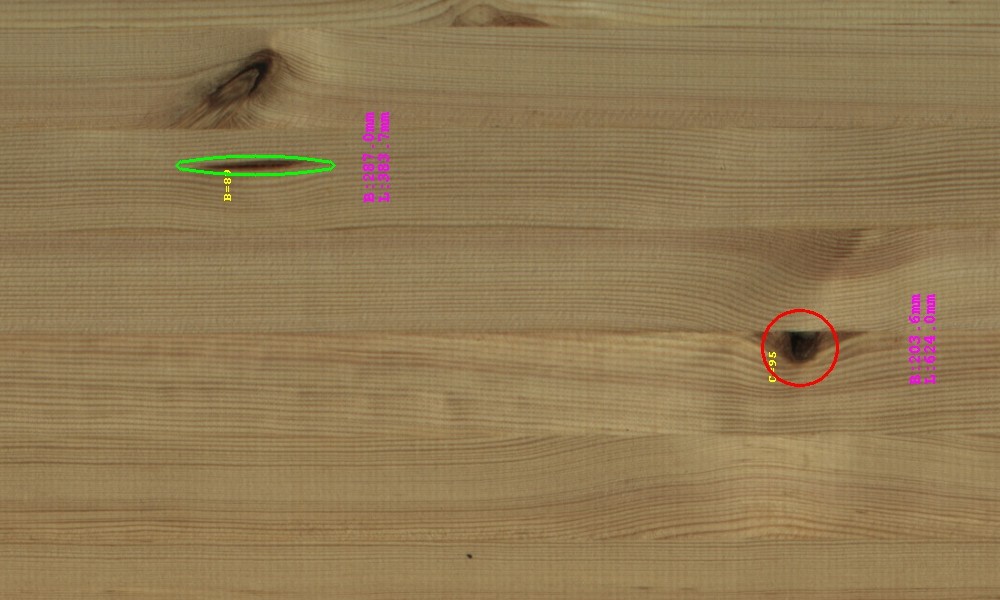
Inspektion af æstetiske defekter på limtræsplader
Formål
Inspektion af knaster og harpikslommer i limtræsplader.
Udfordring
Når man bruger træplader til kvalitetsmøbler, er det meget vigtigt at opdage knaster, der kan forårsage huller eller risikerer at falde ud, inden pladen bruges i en omkostningsfuld produktion. Nogle harpikslommer kan også give problemer, da harpiksen bliver mere flydende, hvis møblet placeres i varme omgivelser, og eksempelvis kan give gule pletter, hvis træet efterfølgende lakeres.
I denne type træsinspektion, er det meget svært at skelne mellem acceptable knaster og harpikslommer og dem, der betyder, at pladen bør kasseres eller repareres. Det er en kombination af flere faktorer, der afgør, om brættet er godt eller dårligt, og traditionelt ville det kræve en erfaren inspektør at afgøre det.
Det er en ressourcekrævende proces, og da der vil være flere forskellige inspektører, som arbejder på linjen, vil deres subjektive vurderinger ofte give uens resultater.
Løsning
Dette resulterer i en meget høj grad af nøjagtighed på +95%, hvilket er langt bedre og mere konsistent end manuel inspektion. Det betyder både, at færre defekter passerer kvalitetskontrollen, og at færre gode plader bliver afvist ved en fejl.
I denne Hybrid Vision løsning laves der også postprocessering af de fejl, som ML-netværket identificerer. Det er vigtigt, om en knast er løs eller ej, og det kan ikke vurderes ved blot at se på et billede. Ved at linke billeder af overside og underside af pladerne, er det imidlertid muligt at fastslå, om knasterne er gennemgående, hvilket øger sandsynligheden for, at der er tale om en løs knast.
Machine learning netværket kan ikke udregne, hvor store de fundne knaster er, men den information er væsentlig i forhold til reparation af knasterne. Derfor postprocesseres billederne af knaster med 2D-vision. En algoritme beregner størrelsen på de knaster, der skal repareres. Denne information sendes så videre til reparationsudstyret på produktionslinjen.
Derfor er Hybrid Vision nødvendigt
Variationen i knaster og harpikslommer er høj, og det vil være meget dyrt eller direkte umuligt at skabe en algoritme, der kunne klassificere alle fejltyper. Samtidig vil det være for tidskrævende at behandle et billede af hele limtræspladen med et neuralt netværk. Det ville kræve, at produktionslinjen arbejdede langsommere, hvilket ville være kontraproduktivt.
Ved at kombinere de to tilgange er det dog muligt at få det bedste fra begge verdener og opnå en effektiv, automatiseret inline-inspektion med høj nøjagtighed.
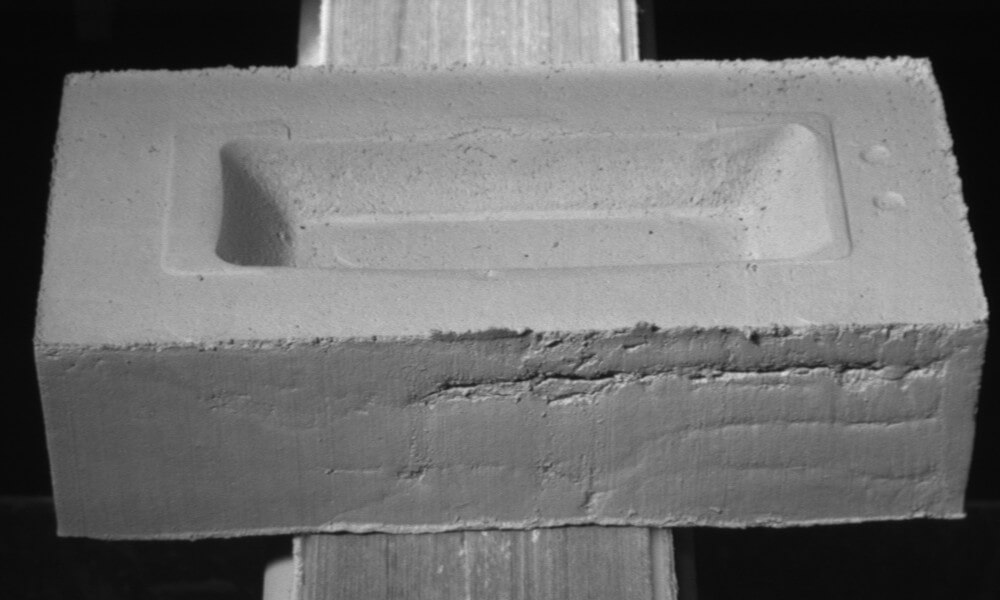
Inspektion af revner i mursten
Formål
At detektere små revner i overfladen på mursten.
Udfordring
Mursten er lavet af et organisk materiale med en naturlig struktur i overfladen, som vil være forskellig fra sten til sten. Der må dog ikke være revner i murstenene, da det udover det rent æstetiske kan blive et funktionelt problem, hvis der trænger vand ind i stenene.
Det kan imidlertid være vanskeligt at skelne små revner fra andre strukturer i overfladen, og samtidig er det ikke alle revner, der er problematiske. Det er kun, hvis de kommer over en bestemt størrelse. Da der vil være en del grænsetilfælde, er udfordringen her at udvikle en løsning, som på en robust måde kan identificere de mursten, der har problematiske revner og skal kasseres.
Løsning
Den udviklede løsning består af tre dele:
Først en præ-processering af billeder af mursten, hvor der udvælges kandidater - altså mulige fejl. Herefter processeres billedudsnittene med kandidater i et machine learning netværk, og endelig laves post-processering med traditionel 2D machine vision, hvor størrelsen på de fundne revner fastslås.
For at identificere revner med en høj grad af nøjagtighed, bruger vi et machine learning netværk, som er trænet på et stort antal billeder af dels mursten uden fejl og dels mursten med revner. På den måde har netværket lært at genkende revnerne, og det giver hver sten en score ud fra sandsynligheden for, at der er en revne i stenen.
De udvalgte kandidater processeres så med traditionel 2D machine vision, som måler størrelsen på revnen og definerer, om fejlen er udenfor tolerancen, så stenen skal kasseres.
Derfor er Hybrid Vision nødvendigt
Hybrid Vision handler om at kombinere de bedste værktøjer til opgaven for at skabe den mest effektive løsning - i dette tilfælde til byggeindustrien.
Traditionel 2D/3D machine vision kommer til kort, når opgaven som her er at detektere æstetiske overfladefejl, som kan se ud på mange forskellige måder.
Til gengæld er det et meget effektivt værktøj til at måle størrelser. Derfor kan man lade det neurale netværk udpege de revner, der skal undersøges nærmere, og derefter bruge traditionel vision-teknologi til at måle den eksakte størrelse på fejlen og afgøre, om den er inden for tolerancen, eller om stenen skal kasseres.
Verificering af indhold
Formål
Kvalitetskontrol af pakning af dele

Udfordring
Mange produkter består af forskellige delelementer, der skal samles i én pakke - tænk bare på byggesæt, møbler, køkkenudstyr, etc.
Det er helt afgørende, at de rigtige dele pakkes sammen, men der kan let opstå fejl under pakningen, som mange steder foregår manuelt. Og så står kunden frustreret tilbage med et produkt, der ikke kan samles.
Indholdet i sådanne pakker kan kvalitettjekkes med machine vision undervejs i processen, men udfordringen er, at indholdet kan være placeret på mange forskellige måder. En pose med skruer kan måske være halvt skjult under et stykke papir. En plade kan være lagt i kassen, men vendt forkert. Der er med andre ord tale om et stort udfaldsrum.
Løsning
Opgaven løses ved at placere en række 2D kameraer over transportbåndet på udvalgte steder, hvor indholdet skal tjekkes.
Først bruges traditionel vision teknologi til at identificere de pakker, som potentielt har en fejl, så det ikke er nødvendigt at bruge machine learning på de åbenlyst gode emner.
De billeder, som afviger fra den definerede standard, processeres derefter gennem et neuralt netværk, som er trænet på et stort antal billeder af forskellige korrekte pakker.
Ved hjaælp af teknologien “anomaly detection” kan det neurale netværk dermed udpege de pakker, som afviger for meget fra normalen til at blive godkendt.
Derfor er Hybrid Vision nødvendigt
Fordi udfaldsrummet er så stort, at det er for ressourcekrævende at bruge traditionel vision teknologi til at løse opgaven, er det nødvendigt at bringe machine learning i spil.
Machine learning netværket kan trænes til at vurdere et emne på samme måde som en erfaren inspektør ville gøre det. Derfor egner denne teknologi sig særdeles godt til denne type opgaver, hvor det er vanskeligt at lave eksakte, fyldestgørende beskrivelser af, hvordan et godt og et dårligt emne ser ud.
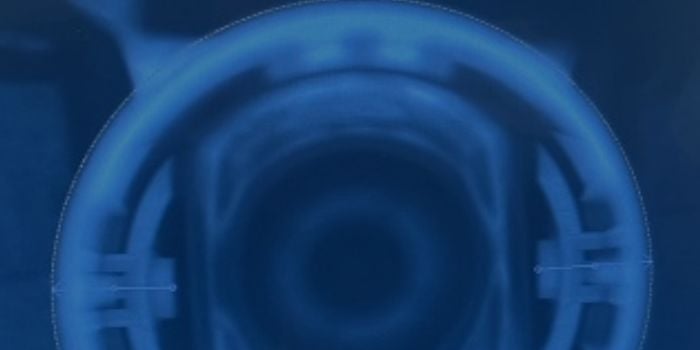
Inspektion af glasrør
Formål
Klassificering af åbne og lukkede “airlines” i glasrør
Udfordring
Med traditionel machine vision er det muligt at detektere fejl i glasrør, som eksempelvis kan være “airlines” (luftlommer).
Udfordringen opstår, når kvalitetskontrollen kræver, at man skal differentiere mellem forskellige fejltyper og eksempelvis skelne mellem airlines med åbne og lukkede ender. Airlines med lukkede ender er ok, mens åbne ender er en kritisk fejl.
Den skelnen kan et standard vision system ikke udføre på en robust måde.
Løsning
Machine vision systemet er i stand til at detektere alle defekter, inklusive airlines, så første trin i processen er at udpege områder med fejl.
Billeder af de udpegede fejl bliver herefter overført til et machine learning netværk, som forinden er blevet trænet med billeder, der er blevet taget af standardsystemet.
Det neurale netværk processerer billedet og tildeler hver fejl en sandsynlighed for, at der er tale om en åben eller lukket airline.
Derfor er Hybrid Vision nødvendigt
Før denne løsning var det ikke muligt at lave en automatiseret sortering mellem åbne og lukkede airlines i glasrør. Men ved at lægge et machine learning lag på toppen af det traditionelle vision system, kan den automatiserede inspektion tages et skridt videre.
Samtidig betyder samspillet mellem standard vision og machine learning, at det er muligt at implementere løsningen hurtigt.
I stedet for at træne machine learning netværket på en masse træningsdata, så sker det i stedet inden for den første uge efter systemets implementering, ved at machine learning netværket trænes med faktiske billeder fra standardsystemet. De annoteres løbende, så netværket lærer at genkende fejltyperme.
Lakerede overflader
Formål
Inspektion af fejl i overfladen på lakerede plader
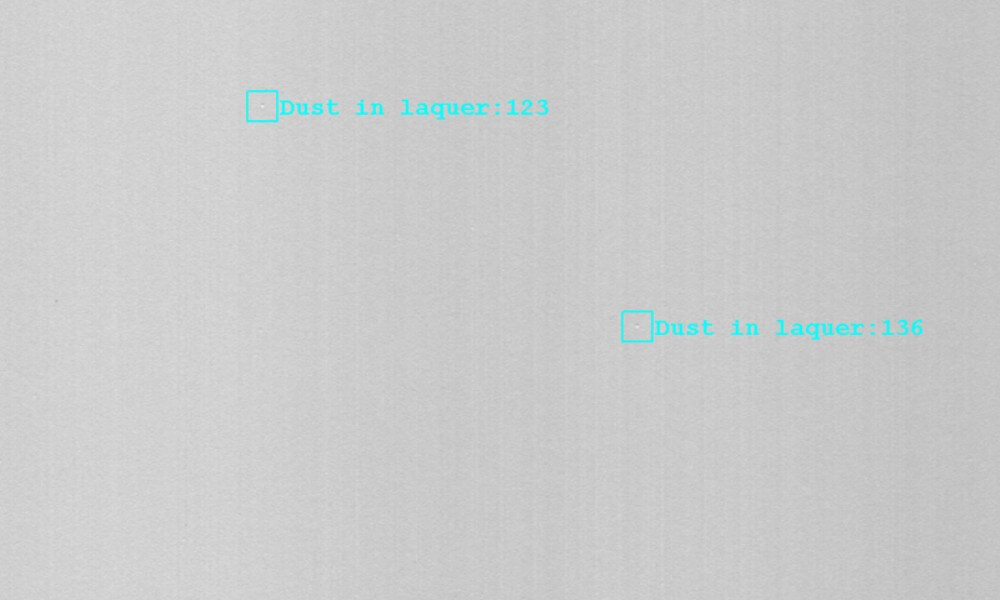
Udfordring
Udfordringen med at inspicere lakerede overflader for fejl, i dette eksempel lakerede køkkenlåger, er det store antal forskellige fejl, som en algoritme skal kunne udpege og klassificere.
Der kan være over 25 forskellige fejlttyper i lakken - små huller, ridser, appelsinhud, støv, osv. Det ville være meget ressourcekrævende at udvikle en algoritme, som er i stand til at finde og klassificere alle fejl, især på grund af den store varians i fejlene.
Løsning
I dette eksempel har vi udviklet en løsning, som først præ-processerer billedet og udpeger områder i billedet, som med en vis sandsynlighed har en fejl. Denne del kan vi bruge traditionel machine vision til, da den ikke skal gøre andet end at finde områder, der afviger fra, hvordan overfladen ellers ser ud.
Billedudsnittene bearbejder vi så i et neuralt netværk, som er blevet trænet på et stort antal gode og dårlige billeder, der er blevet annoteret, så netværket lærer de forskellige fejltyper at kende. Netværket kan herefter med en høj grad af sandsynlighed vurdere, om der er tale om en fejl, og samtidig definere, hvilken fejltype der er tale om.
Det neurale netværk udpeger fejlene ved at sætte en sandsynlighed for, at en bestemt fejl er til stede i et billedudsnit. I nogle tilfælde vil værdien være tæt på den tærskelværdi, som vi har defineret for, at der er tale om en fejl. Hvis der er bestemte fejl, som er særligt vigtige at undgå, kan vi bruge traditionel machine vision til at post-processere disse billedudsnit.
Da vi har indsnævret udfaldsrummet gennem machine learning, har vi nu mulighed for at lave en algoritme, som kigger efter helt specikke karakteristika ved en given fejl. På den måde øger vi systemets nøjagtighed.
Derfor er Hybrid Vision nødvendigt
Det er ofte en dårlig idé at processere et helt billede med machine learning, da det vil tage for lang tid og kræve unødige ressourcer. Systemet bliver langt mere effektivt, når vi bruger traditionel 2D og 3D vision til at identificere de områder af et billede, som vi vil køre gennem machine learning netværket.
Når kompleksiteten af en opgave er tilpas stor, er det som oftest ikke muligt at løse den med standard machine learning løsninger. Det kræver stor faglig ekspertise at træne netværket til at blive robust nok til at identificere og klassificere et højt antal forskellige fejl med stor varians.